搜索到
361
篇与
的结果
-
 中国民航大学专利申请流程 STEP1:把专利写好参考资料:参考专利STEP2:找代理要专利委托表把专利发给代理,代理会通过邮件发过来两个专利委托表STEP3:填表填写这两个专利委托表+中国民航大学专利申请报告书STEP4:去学院签字盖章把中国民航大学专利申请报告书拿到院长那签字+去张大伟老师那盖章STEP5:去科技处交表北教1-5楼出电梯就是了交中国民航大学专利申请报告书STEP6:把相关的文件拿给老师去学校盖章让老师去学校给专利委托文件盖章STEP7:快递委托文件把签字盖章后的专利委托文件快递寄到代理给的地址STEP8:付款和报销直接微信把钱转给代理,然后把快递地址给代理,代理会把发票记过来拿发票去找谢老师报销
中国民航大学专利申请流程 STEP1:把专利写好参考资料:参考专利STEP2:找代理要专利委托表把专利发给代理,代理会通过邮件发过来两个专利委托表STEP3:填表填写这两个专利委托表+中国民航大学专利申请报告书STEP4:去学院签字盖章把中国民航大学专利申请报告书拿到院长那签字+去张大伟老师那盖章STEP5:去科技处交表北教1-5楼出电梯就是了交中国民航大学专利申请报告书STEP6:把相关的文件拿给老师去学校盖章让老师去学校给专利委托文件盖章STEP7:快递委托文件把签字盖章后的专利委托文件快递寄到代理给的地址STEP8:付款和报销直接微信把钱转给代理,然后把快递地址给代理,代理会把发票记过来拿发票去找谢老师报销 -
快速使用Faster RCNN进行训练VOC格式的数据集 训练步骤STEP1:下载代码并配置环境git clone https://github.com/bubbliiiing/faster-rcnn-pytorch.git cd faster-rcnn-pytorch pip install -r requirements.txtSTEP2:根据文件结构填充VOC格式的数据集数据放置格式(只需完成#TODO部分即可)├──VOCdevkit/VOC2007/ ├── Annotations ├──放置xml文件 #TODO ├── JPEGImages ├──放置img文件 #TODO ├──ImageSets/Main ├──放置训练索引文件 (无需手动完成,自动生成) ├── voc2frcnn.py #数据分割脚本,用于生成训练索引文件编辑voc2frcnn.py。设置tarin\val\test数据分割比例#----------------------------------------------------------------------# # 想要增加测试集修改trainval_percent # train_percent不需要修改 #----------------------------------------------------------------------# trainval_percent=1 train_percent=1生成训练索引文件python voc2frcnn.pySTEP3:生成最终训练所需的txt文件编辑根目录下的voc_annotation.py,将classes改成你自己的classes(注意不要使用中文标签,文件夹中不要有空格!)classes = ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"]然后运行voc_annotation.pypython voc_annotation.py此时会生成对应的2007_train.txt,每一行对应其图片位置及其真实框的位置。STEP4:编辑model_data/voc_classes.txt将其中的类别数改为自己的,文件内容为cat dog ...STEP5:修改train.py的NUM_CLASSSES将train.py的NUM_CLASSSES修改成所需要分的类的个数(不需要+1)STEP6:开始训练python train.pySTEP7:模型效果评估评估过程可参考视频https://www.bilibili.com/video/BV1zE411u7Vw参考资料https://github.com/bubbliiiing/faster-rcnn-pytorch
-
快速使用YOLOv5进行训练VOC格式的数据集 训练步骤STEP1:下载官方YOLOv5的代码并配置环境git clone https://github.com/ultralytics/yolov5 cd yolov5 pip install -r requirements.txtSTEP2:准备VOC格式的数据集数据放置格式├──train_data_VOC ├── Annotations ├──放置xml文件 ├── JPEGImages ├──防止img文件STEP3:将数据集转为YOLOv5所需要的COCO格式mkdir train_data_COCO vim VOC2COCO.pyimport os import shutil import random import xmltodict from progressbar import * #================================================================================================================ # 函数定义区 # 函数-将voc xml中的object转化为对应的一条yolo数据 def get_yolo_data(obj,img_width,img_height): # 获取voc格式的数据信息 name = obj['name'] xmin = float(obj['bndbox']['xmin']) xmax = float(obj['bndbox']['xmax']) ymin = float(obj['bndbox']['ymin']) ymax = float(obj['bndbox']['ymax']) # 计算yolo格式的数据信息 class_idx = class_names.index(name) x_center,y_center = (xmin+xmax)/2,(ymin+ymax)/2 box_width = xmax - xmin box_height = ymax - ymin yolo_data = "{} {} {} {} {}\n".format(class_idx,x_center/img_width,y_center/img_height,box_width/img_width,box_height/img_height) return yolo_data # 函数-将xml文件转为txt文件 def convert_annotations(image_name): in_file = xml_file_path + image_name + '.xml' out_file = txt_file_path + image_name + '.txt' yolo_data = "" with open(in_file) as f: xml_str = f.read() # 转为字典 xml_dic = xmltodict.parse(xml_str) # 获取图片的width、height img_width = float(xml_dic["annotation"]["size"]["width"]) img_height = float(xml_dic["annotation"]["size"]["height"]) # 获取xml文件中的object objects = xml_dic["annotation"]["object"] if isinstance(objects,list): # xml文件中包含多个object for obj in objects: yolo_data += get_yolo_data(obj,img_width,img_height) else: # xml文件中包含1个object obj = objects yolo_data += get_yolo_data(obj,img_width,img_height) with open(out_file,'w') as f: f.write(yolo_data) # 函数-创建最终用于训练的COCO格式数据集的文件夹 def create_dir(): if not os.path.exists('train_data_COCO/images/'): os.makedirs('train_data_COCO/images/') if not os.path.exists('train_data_COCO/labels/'): os.makedirs('train_data_COCO/labels/') if not os.path.exists('train_data_COCO/images/train/'): os.makedirs('train_data_COCO/images/train') if not os.path.exists('train_data_COCO/images/val/'): os.makedirs('train_data_COCO/images/val/') if not os.path.exists('train_data_COCO/images/test/'): os.makedirs('train_data_COCO/images/test/') if not os.path.exists('train_data_COCO/labels/train/'): os.makedirs('train_data_COCO/labels/train/') if not os.path.exists('train_data_COCO/labels/val/'): os.makedirs('train_data_COCO/labels/val/') if not os.path.exists('train_data_COCO/labels/test/'): os.makedirs('train_data_COCO/labels/test/') return #================================================================================================================ # 功能实现区 """ STEP1:准备工作:数据准备+创建各种所需的文件夹 """ # 对应的VOC数据集的路径参数+类别参数 xml_file_path = './train_data_VOC/Annotations/' # 检查和自己的xml文件夹名称是否一致 images_file_path = './train_data_VOC/JPEGImages/' # 检查和自己的图像文件夹名称是否一致 class_names = ['Person', 'BridgeVehicle', 'LuggageVehicle', 'Plane', 'RefuelVehicle', 'FoodVehicle', 'RubbishVehicle', 'WaterVehicle', 'PlatformVehicle', 'TractorVehicle'] # 创一个临时文件夹用来存放xml文件转换出来的对应的txt文件 if not os.path.exists('train_data_COCO/temp_labels/'): os.makedirs('train_data_COCO/temp_labels/') txt_file_path = 'train_data_COCO/temp_labels/' # 执行xml到txt的转换,存储到一个临时文件夹 total_xml = os.listdir(xml_file_path) num_xml = len(total_xml) # XML文件总数 for i in range(num_xml): name = total_xml[i][:-4] convert_annotations(name) # 创建COCO格式的数据所需要的各种文件夹 create_dir() # 读取所有的txt文件 total_txt = os.listdir(txt_file_path) print("数据准备工作完成,开始进行数据分配") """ STEP2:数据分配:按比例对数据集进行划分 """ # 设置数据集划分比例,训练集75%,验证集15%,测试集15% train_percent = 0.8 val_percent = 0.15 test_percent = 0.05 # 计算train,val,test每一类的数据数量 num_txt = len(total_txt) num_train = int(num_txt * train_percent) num_val = int(num_txt * val_percent) num_test = num_txt - num_train - num_val # 根据计算出的每类的数据数量计算出进行数据分配的索引 list_all_txt = range(num_txt) # 范围 range(0, num) train = random.sample(list_all_txt, num_train)# train从list_all_txt取出num_train个元素 val_test = [i for i in list_all_txt if not i in train]# 所以list_all_txt列表只剩下了这些元素:val_test val = random.sample(val_test, num_val)# 再从val_test取出num_val个元素,val_test剩下的元素就是test # 根据采样的索引结果进行文件分配工作 print("训练集数目:{}, 验证集数目:{},测试集数目:{}".format(len(train), len(val), len(val_test) - len(val))) #进度条功能 widgets = ['VOC2COCO: ',Percentage(), ' ', Bar('#'),' ', Timer(),' ', ETA()] pbar = ProgressBar(widgets=widgets, maxval=num_txt).start() count = 0 for i in list_all_txt: name = total_txt[i][:-4] srcImage = images_file_path + name + '.jpg' srcLabel = txt_file_path + name + '.txt' if i in train: dst_train_Image = 'train_data_COCO/images/train/' + name + '.jpg' dst_train_Label = 'train_data_COCO/labels/train/' + name + '.txt' shutil.copyfile(srcImage, dst_train_Image) shutil.copyfile(srcLabel, dst_train_Label) elif i in val: dst_val_Image = 'train_data_COCO/images/val/' + name + '.jpg' dst_val_Label = 'train_data_COCO/labels/val/' + name + '.txt' shutil.copyfile(srcImage, dst_val_Image) shutil.copyfile(srcLabel, dst_val_Label) else: dst_test_Image = 'train_data_COCO/images/test/' + name + '.jpg' dst_test_Label = 'train_data_COCO/labels/test/' + name + '.txt' shutil.copyfile(srcImage, dst_test_Image) shutil.copyfile(srcLabel, dst_test_Label) #更新进度条 count += 1 pbar.update(count) #释放进度条 pbar.finish() print("数据分配工作完成,开始释放临时文") """ STEP3:释放临时文件 """ shutil.rmtree(txt_file_path) print("临时文件释放完成,VOC2COCO执行结束")python VOC2COCO.pySTEP4:在data下创建与数据对应的data.yaml文件文件内容按照数据的数据情况填写path: train_data_COCO # root train: # train images (relative to 'path') - images/train val: # val images (relative to 'path') - images/val test: # test images (optional) - images/test # Classes nc: 10 # number of classes names: ['Person', 'BridgeVehicle', 'LuggageVehicle', 'Plane', 'RefuelVehicle', 'FoodVehicle', 'RubbishVehicle', 'WaterVehicle', 'PlatformVehicle', 'TractorVehicle'] # class namesSTEP5:下载预训练模型mkdir weights cd weights wget https://github.com/ultralytics/yolov5/releases/download/v5.0/yolov5s.ptSTEP6:开始训练python train.py --data data/data.yaml --cfg models/yolov5s.yaml --weights weights/yolov5s.pt --batch-size 64 --epochs 60 参考资料https://github.com/ultralytics/yolov5
-
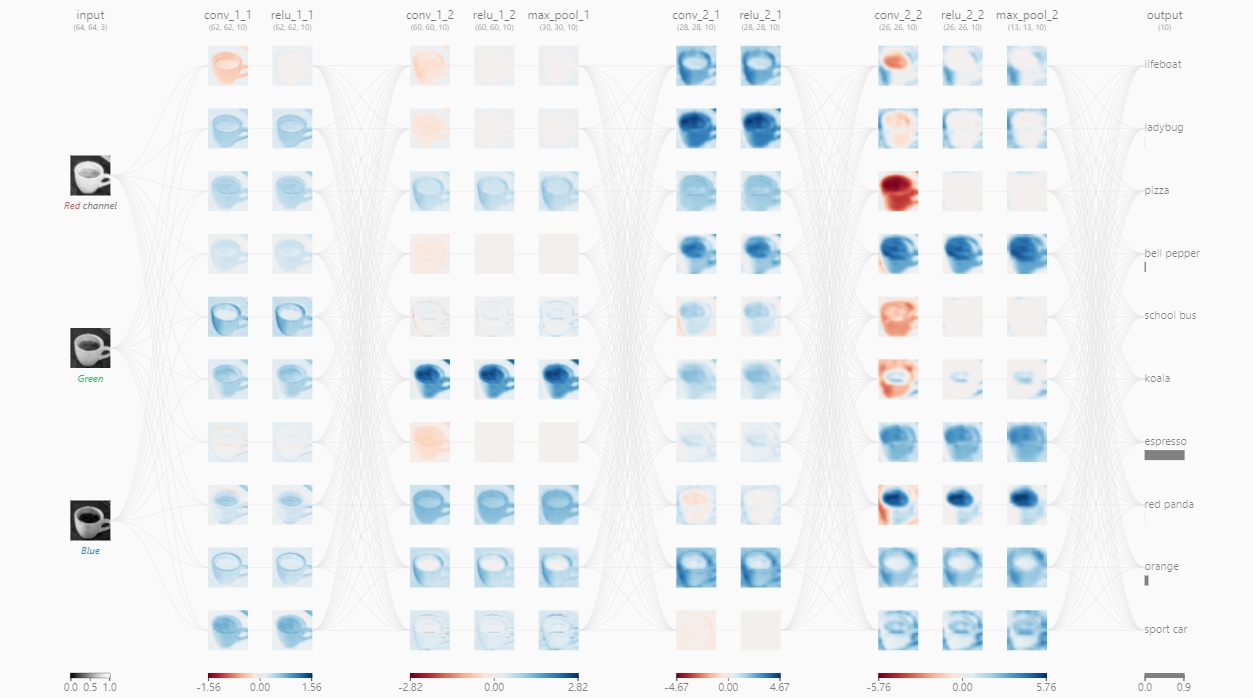
深度学习中的FLOPs介绍及计算(注意区分FLOPS) FLOPS与FLOPsFLOPS:注意全大写,是floating point operations per second的缩写,意指每秒浮点运算次数,理解为计算速度。是一个衡量硬件性能的指标。FLOPs:注意s小写,是floating point operations的缩写(s表复数),意指浮点运算数,理解为计算量。可以用来衡量算法/模型的复杂度。全连接网络中FLOPs的计算推导以4个输入神经元和3个输出神经元为例计算一个输出神经元的的计算过程为$$ y1 = w_{11}*x_1+w_{21}*x_2+w_{31}*x_3+w_{41}*x_4 $$所需的计算次数为4次乘法3次加法共需4+3=7计算。推广到I个输入神经元O个输出神经元后则计算一个输出神经元所需要的计算次数为$I+(I-1)=2I-1$,则总的计算次数为$$ FLOPs = (2I-1)*O $$考虑bias则为$$ y1 = w_{11}*x_1+w_{21}*x_2+w_{31}*x_3+w_{41}*x_4+b1 $$总的计算次数为$$ FLOPs = 2I*O $$结果FC(full connected)层FLOPs的计算公式如下(不考虑bias时有-1,有bias时没有-1):$$ FLOPs = (2 \times I - 1) \times O $$其中:I = input neuron numbers(输入神经元的数量)O = output neuron numbers(输出神经元的数量)CNN中FLOPs的计算以下答案不考虑activation function的运算推导对于输入通道数为$C_{in}$,卷积核的大小为K,输出通道数为$C_{out}$,输出特征图的尺寸为$H*W$进行一次卷积运算的计算次数为乘法$C_{in}K^2$次加法$C_{in}K^2-1$次共计$C_{in}K^2+C_{in}K^2-1=2C_{in}K^2-1$次,若考虑bias则再加1次得到一个channel的特征图所需的卷积次数为$H*W$次共计需得到$C_{out}$个特征图因此对于CNN中的一个卷积层来说总的计算次数为(不考虑bias时有-1,考虑bias时没有-1):$$ FLOPs = (2C_{in}K^2-1)HWC_{out} $$结果卷积层FLOPs的计算公式如下(不考虑bias时有-1,有bias时没有-1):$$ FLOPs = (2C_{in}K^2-1)HWC_{out} $$其中:$C_{in}$ = input channelK= kernel sizeH,W = output feature map size$C_{out}$ = output channel计算FLOPs的代码或包torchstatfrom torchstat import stat import torchvision.models as models model = models.vgg16() stat(model, (3, 224, 224)) module name input shape output shape params memory(MB) MAdd Flops MemRead(B) MemWrite(B) duration[%] MemR+W(B) 0 features.0 3 224 224 64 224 224 1792.0 12.25 173,408,256.0 89,915,392.0 609280.0 12845056.0 3.67% 13454336.0 1 features.1 64 224 224 64 224 224 0.0 12.25 3,211,264.0 3,211,264.0 12845056.0 12845056.0 1.83% 25690112.0 2 features.2 64 224 224 64 224 224 36928.0 12.25 3,699,376,128.0 1,852,899,328.0 12992768.0 12845056.0 8.43% 25837824.0 3 features.3 64 224 224 64 224 224 0.0 12.25 3,211,264.0 3,211,264.0 12845056.0 12845056.0 1.45% 25690112.0 4 features.4 64 224 224 64 112 112 0.0 3.06 2,408,448.0 3,211,264.0 12845056.0 3211264.0 11.37% 16056320.0 5 features.5 64 112 112 128 112 112 73856.0 6.12 1,849,688,064.0 926,449,664.0 3506688.0 6422528.0 4.03% 9929216.0 6 features.6 128 112 112 128 112 112 0.0 6.12 1,605,632.0 1,605,632.0 6422528.0 6422528.0 0.73% 12845056.0 7 features.7 128 112 112 128 112 112 147584.0 6.12 3,699,376,128.0 1,851,293,696.0 7012864.0 6422528.0 5.86% 13435392.0 8 features.8 128 112 112 128 112 112 0.0 6.12 1,605,632.0 1,605,632.0 6422528.0 6422528.0 0.37% 12845056.0 9 features.9 128 112 112 128 56 56 0.0 1.53 1,204,224.0 1,605,632.0 6422528.0 1605632.0 7.32% 8028160.0 10 features.10 128 56 56 256 56 56 295168.0 3.06 1,849,688,064.0 925,646,848.0 2786304.0 3211264.0 3.30% 5997568.0 11 features.11 256 56 56 256 56 56 0.0 3.06 802,816.0 802,816.0 3211264.0 3211264.0 0.00% 6422528.0 12 features.12 256 56 56 256 56 56 590080.0 3.06 3,699,376,128.0 1,850,490,880.0 5571584.0 3211264.0 5.13% 8782848.0 13 features.13 256 56 56 256 56 56 0.0 3.06 802,816.0 802,816.0 3211264.0 3211264.0 0.37% 6422528.0 14 features.14 256 56 56 256 56 56 590080.0 3.06 3,699,376,128.0 1,850,490,880.0 5571584.0 3211264.0 4.76% 8782848.0 15 features.15 256 56 56 256 56 56 0.0 3.06 802,816.0 802,816.0 3211264.0 3211264.0 0.37% 6422528.0 16 features.16 256 56 56 256 28 28 0.0 0.77 602,112.0 802,816.0 3211264.0 802816.0 2.56% 4014080.0 17 features.17 256 28 28 512 28 28 1180160.0 1.53 1,849,688,064.0 925,245,440.0 5523456.0 1605632.0 3.66% 7129088.0 18 features.18 512 28 28 512 28 28 0.0 1.53 401,408.0 401,408.0 1605632.0 1605632.0 0.00% 3211264.0 19 features.19 512 28 28 512 28 28 2359808.0 1.53 3,699,376,128.0 1,850,089,472.0 11044864.0 1605632.0 5.50% 12650496.0 20 features.20 512 28 28 512 28 28 0.0 1.53 401,408.0 401,408.0 1605632.0 1605632.0 0.00% 3211264.0 21 features.21 512 28 28 512 28 28 2359808.0 1.53 3,699,376,128.0 1,850,089,472.0 11044864.0 1605632.0 5.49% 12650496.0 22 features.22 512 28 28 512 28 28 0.0 1.53 401,408.0 401,408.0 1605632.0 1605632.0 0.00% 3211264.0 23 features.23 512 28 28 512 14 14 0.0 0.38 301,056.0 401,408.0 1605632.0 401408.0 1.10% 2007040.0 24 features.24 512 14 14 512 14 14 2359808.0 0.38 924,844,032.0 462,522,368.0 9840640.0 401408.0 2.94% 10242048.0 25 features.25 512 14 14 512 14 14 0.0 0.38 100,352.0 100,352.0 401408.0 401408.0 0.00% 802816.0 26 features.26 512 14 14 512 14 14 2359808.0 0.38 924,844,032.0 462,522,368.0 9840640.0 401408.0 2.57% 10242048.0 27 features.27 512 14 14 512 14 14 0.0 0.38 100,352.0 100,352.0 401408.0 401408.0 0.00% 802816.0 28 features.28 512 14 14 512 14 14 2359808.0 0.38 924,844,032.0 462,522,368.0 9840640.0 401408.0 2.19% 10242048.0 29 features.29 512 14 14 512 14 14 0.0 0.38 100,352.0 100,352.0 401408.0 401408.0 0.37% 802816.0 30 features.30 512 14 14 512 7 7 0.0 0.10 75,264.0 100,352.0 401408.0 100352.0 0.37% 501760.0 31 avgpool 512 7 7 512 7 7 0.0 0.10 0.0 0.0 0.0 0.0 0.00% 0.0 32 classifier.0 25088 4096 102764544.0 0.02 205,516,800.0 102,760,448.0 411158528.0 16384.0 10.62% 411174912.0 33 classifier.1 4096 4096 0.0 0.02 4,096.0 4,096.0 16384.0 16384.0 0.00% 32768.0 34 classifier.2 4096 4096 0.0 0.02 0.0 0.0 0.0 0.0 0.37% 0.0 35 classifier.3 4096 4096 16781312.0 0.02 33,550,336.0 16,777,216.0 67141632.0 16384.0 2.20% 67158016.0 36 classifier.4 4096 4096 0.0 0.02 4,096.0 4,096.0 16384.0 16384.0 0.00% 32768.0 37 classifier.5 4096 4096 0.0 0.02 0.0 0.0 0.0 0.0 0.37% 0.0 38 classifier.6 4096 1000 4097000.0 0.00 8,191,000.0 4,096,000.0 16404384.0 4000.0 0.73% 16408384.0 total 138357544.0 109.39 30,958,666,264.0 15,503,489,024.0 16404384.0 4000.0 100.00% 783170624.0 ============================================================================================================================================================ Total params: 138,357,544 ------------------------------------------------------------------------------------------------------------------------------------------------------------ Total memory: 109.39MB Total MAdd: 30.96GMAdd Total Flops: 15.5GFlops Total MemR+W: 746.89MB 参考资料CNN 模型所需的计算力(flops)和参数(parameters)数量是怎么计算的?分享一个FLOPs计算神器CNN Explainer[Molchanov P , Tyree S , Karras T , et al. Pruning Convolutional Neural Networks for Resource Efficient Transfer Learning[J]. 2016.](https://arxiv.org/pdf/1611.06440.pdf)
-
卷积神经网络中的深度可分离卷积(Depthwise Separable Convolution) 一些轻量级的网络,如mobileNet中,会有深度可分离卷积depthwise separable convolution,由depthwise(DW)和pointwise(PW)两个部分结合起来,用来提取特征feature map。相比常规的卷积操作,其参数数量和运算成本比较低。1.常规卷积操作对于一张5×5像素、三通道(shape为5×5×3),经过3×3卷积核的卷积层(假设输出通道数为4,则卷积核shape为3×3×3×4,最终输出4个Feature Map,如果有same padding则尺寸与输入层相同(5×5),如果没有则为尺寸变为3×3卷积层共4个Filter,每个Filter包含了3个Kernel,每个Kernel的大小为3×3。因此卷积层的参数数量可以用如下公式来计算:$$ N_{std} = 4 × 3 × 3 × 3 = 108 $$2.深度可分离卷积2.1逐通道卷积Depthwise Convolution的一个卷积核负责一个通道,一个通道只被一个卷积核卷积一张5×5像素、三通道彩色输入图片(shape为5×5×3),Depthwise Convolution首先经过第一次卷积运算,DW完全是在二维平面内进行。卷积核的数量与上一层的通道数相同(通道和卷积核一一对应)。所以一个三通道的图像经过运算后生成了3个Feature map(如果有same padding则尺寸与输入层相同为5×5),如下图所示。其中一个Filter只包含一个大小为3×3的Kernel,卷积部分的参数个数计算如下:$$ N_{depthwise} = 3 × 3 × 3 = 27 $$Depthwise Convolution完成后的Feature map数量与输入层的通道数相同,无法扩展Feature map。而且这种运算对输入层的每个通道独立进行卷积运算,没有有效的利用不同通道在相同空间位置上的feature信息。因此需要Pointwise Convolution来将这些Feature map进行组合生成新的Feature map2.2逐点卷积Pointwise Convolution的运算与常规卷积运算非常相似,它的卷积核的尺寸为 1×1×M,M为上一层的通道数。所以这里的卷积运算会将上一步的map在深度方向上进行加权组合,生成新的Feature map。有几个卷积核就有几个输出Feature map由于采用的是1×1卷积的方式,此步中卷积涉及到的参数个数可以计算为:$$ N_{pointwise} = 1 × 1 × 3 × 4 = 12 $$经过Pointwise Convolution之后,同样输出了4张Feature map,与常规卷积的输出维度相同3.参数对比回顾一下,常规卷积的参数个数为:$$ N_{std} = 4 × 3 × 3 × 3 = 108 $$Separable Convolution的参数由两部分相加得到:$$ N_{depthwise} = 3 × 3 × 3 = 27 \\ N_{pointwise} = 1 × 1 × 3 × 4 = 12 \\ N_{separable} = N_{depthwise} + N_{pointwise} = 39 \\ $$相同的输入,同样是得到4张Feature map,Separable Convolution的参数个数是常规卷积的约1/3。因此,在参数量相同的前提下,采用Separable Convolution的神经网络层数可以做的更深。参考资料卷积神经网络中的Separable Convolution:https://yinguobing.com/separable-convolution/#fn2深度可分离卷积:https://zhuanlan.zhihu.com/p/92134485
-
光流法简介及实现 1.光流法简介1.1光流光流(optical flow)是空间运动物体在观察成像平面上的像素运动的瞬时速度。通常将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。一言以概之:所谓光流就是瞬时速率,在时间间隔很小(比如视频的连续前后两帧之间)时,也等同于目标点的位移三言以概之:所谓光流场就是很多光流的集合。 当我们计算出了一幅图片中每个图像的光流,就能形成光流场。 构建光流场是试图重现现实世界中的运动场,用以运动分析。 1.2光流法光流法是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。1.3光流法的基本假设条件亮度恒定不变。即同一目标在不同帧间运动时,其亮度不会发生改变。这是基本光流法的假定(所有光流法变种都必须满足),用于得到光流法基本方程;时间连续或运动是“小运动”。即时间的变化不会引起目标位置的剧烈变化,相邻帧之间位移要比较小。同样也是光流法不可或缺的假定。1.4光流场在空间中,运动可以用运动场描述,而在一个图像平面上,物体的运动往往是通过图像序列中不同图像灰度分布的不同体现的,从而,空间中的运动场转移到图像上就表示为光流场(optical flow field)。光流场是一个二维矢量场,它反映了图像上每一点灰度的变化趋势,可看成是带有灰度的像素点在图像平面上运动而产生的瞬时速度场。它包含的信息即是各像点的瞬时运动速度矢量信息。研究光流场的目的就是为了从序列图像中近似计算不能直接得到的运动场。光流场在理想情况下,光流场对应于运动场。1.5稠密光流与稀疏光流稠密光流稠密光流是一种针对图像或指定的某一片区域进行逐点匹配的图像配准方法,它计算图像上所有的点的偏移量,从而形成一个稠密的光流场。通过这个稠密的光流场,可以进行像素级别的图像配准。稀疏光流与稠密光流相反,稀疏光流并不对图像的每个像素点进行逐点计算。它通常需要指定一组点进行跟踪,这组点最好具有某种明显的特性,例如Harris角点等,那么跟踪就会相对稳定和可靠。稀疏跟踪的计算开销比稠密跟踪小得多。1.6光流法的优缺点优点光流法的优点在于它无须了解场景的信息,就可以准确地检测识别运动日标位置,且在摄像机处于运动的情况下仍然适用。而且光流不仅携带了运动物体的运动信息,而且还携带了有关景物三维结构的丰富信息,它能够在不知道场景的任何信息的情况下,检测出运动对象。缺点光流法的适用条件,即两个基本假设,在现实情况下均不容易满足。假设一:亮度恒定不变。但是实际情况是光流场并不一定反映了目标的实际运动情况,如图,所示。图中,光源不动,而物体表面均一,且产生了自传运动,却并没有产生光流图中,物体并没有运动,但是光源与物体发生相对运动,却有光流产生。因此可以说光流法法对光线敏感, 光线变化极易影响识别效果。假设二:小运动。现实情况下较大距离的运动也是普遍存在的。因此当需要检测的目标运动速度过快是,传统光流法也不适用。对稀疏光流算法而言存在着孔径问题,对稠密光流算法而言存在着计算量大的问题。观察上图(a)我们可以看到目标是在向右移动,但是由于“观察窗口”过小我们无法观测到边缘也在下降。LK算法中选区的小邻域就如同上图的观察窗口,邻域大小的选取会影响到最终的效果。当然,这是针对于一部分稀疏光流算法而言,属于稠密光流范畴的算法一般不存在这个问题。但是稠密光流法的显著缺点主要体现在,计算量大,耗时长,在对实时性要求苛刻的情况下并不适用。2.算法实现2.1稀疏光流-只跟踪某些角点(角点检测使用Shi-Tomasi检测算法)代码""" 稀疏光流,只跟踪某些角点 """ import numpy as np import cv2 import matplotlib.pyplot as plt video_path = "./test.mp4" cap = cv2.VideoCapture(video_path) # 打开视频 # ShiTomasi 角点检测参数 feature_params = dict( maxCorners = 100, qualityLevel = 0.3, minDistance = 7, blockSize = 7 ) # lucas kanade光流法参数 lk_params = dict( winSize = (15,15), maxLevel = 2, criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)) # 创建随机颜色 color = np.random.randint(0,255,(100,3)) # 获取第一帧的灰度图像及其角点 ret, old_frame = cap.read() #获取第一帧 old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY) #找到原始灰度图 #获取第一帧的灰度图中的角点p0 p0 = cv2.goodFeaturesToTrack(old_gray, mask = None, **feature_params) #创建一个蒙版用来画轨迹,i.e.和每帧图像大小相同的全0张量 mask = np.zeros_like(old_frame) # 对每帧图像计算光流并绘制光流轨迹 while(True): ret,frame = cap.read() if not ret: print("This video has been processed.") break frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 计算每帧的光流 p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params) # 选取好的跟踪点 good_new = p1[st==1] good_old = p0[st==1] # 画出轨迹 for i,(new,old) in enumerate(zip(good_new,good_old)): a,b = new.ravel() c,d = old.ravel() mask = cv2.line(mask, (int(a),int(b)),(int(c),int(d)), color[i].tolist(), 2) #添加了该帧光流的轨迹图 frame = cv2.circle(frame,(int(a),int(b)),5,color[i].tolist(),-1) # 效果可视化 img = cv2.add(frame,mask) #将该图和轨迹图合并 img_show = np.hstack((img,mask)) cv2.imshow('frame',img_show) if cv2.waitKey(50)&0xFF==ord("q"): break # 更新"上一帧图像"和追踪点 old_gray = frame_gray.copy() p0 = good_new.reshape(-1,1,2) cv2.destroyAllWindows() cap.release() 实现效果2.2稠密光流-跟踪所有的像素点代码# 稠密光流 import numpy as np import cv2 video_path = "./test.mp4" cap = cv2.VideoCapture(video_path) # 打开视频 # 获取第一帧 ret, frame1 = cap.read() prvs = cv2.cvtColor(frame1,cv2.COLOR_BGR2GRAY) # 创建光流矢量绘制蒙版 hsv = np.zeros_like(frame1) # 遍历每一行的第1列 hsv[...,1] = 255 while(1): ret, frame2 = cap.read() next = cv2.cvtColor(frame2,cv2.COLOR_BGR2GRAY) # 返回一个两通道的光流向量,实际上是每个点的像素位移值 flow = cv2.calcOpticalFlowFarneback(prvs,next, None, 0.5, 3, 15, 3, 5, 1.2, 0) # 笛卡尔坐标转换为极坐标,获得极轴和极角 mag, ang = cv2.cartToPolar(flow[...,0], flow[...,1]) hsv[...,0] = ang*180/np.pi/2 hsv[...,2] = cv2.normalize(mag,None,0,255,cv2.NORM_MINMAX) rgb = cv2.cvtColor(hsv,cv2.COLOR_HSV2BGR) # 光流法结果可视化 img_show = np.hstack((frame2,rgb)) cv2.imshow('frame',img_show) if cv2.waitKey(50)&0xFF==ord("q"): break prvs = next cap.release() cv2.destroyAllWindows()实现效果参考资料计算机视觉--光流法(optical flow)简介:https://blog.csdn.net/qq_41368247/article/details/82562165光流法简述(重庆邮电大学.孔令上):https://wenku.baidu.com/view/7a2cb968ff00bed5b8f31d6c.htmlOPENCV对光流法的实现(PYTHON3):https://www.freesion.com/article/32791433918/角点检测:Harris 与 Shi-Tomasi:https://zhuanlan.zhihu.com/p/83064609python opencv入门 光流法(41):https://blog.csdn.net/tengfei461807914/article/details/80978947
-
帧差法+三帧差法原理与实现 帧差法原理移动侦测即是根据视频每帧或者几帧之间像素的差异,对差异值设置阈值,筛选大于阈值的像素点,做掩模图即可选出视频中存在变化的桢。帧差法较为简单的视频中物体移动侦测,帧差法分为:单帧差和三桢差。随着帧数的增加是防止检测结果的重影。单帧差法算法原理以视频为例进行单帧差法移动侦测算法实现import cv2 import pandas as pd import numpy as np video_path = "./test.mp4" cam = cv2.VideoCapture(video_path) # 打开一个视频 input_fps = cam.get(cv2.CAP_PROP_FPS) # 获取视频帧率 ret_val, input_image = cam.read() # 读取视频第一帧 gray_lwpCV = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY) # 将第一帧转为灰度 gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0) # 对转换后的灰度图进行高斯模糊 background=gray_lwpCV # 将高斯模糊后的第一帧作为初始化背景 area_threh = 100 # 物体bbox面积阈值 while(cam.isOpened()) and ret_val == True: ret_val, input_image = cam.read() # 继续读取视频帧 gray_lwpCV = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY) gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0) # 对读取到的视频帧进行灰度处理+高斯模糊 diff = cv2.absdiff(background, gray_lwpCV) # 将最新读取的视频帧和背景做差 #跟着图像变换背景,如果背景变化区域小于20%或者75%,则将当前帧作为新得背景区域 tem_diff=diff.flatten() tem_ds=pd.Series(tem_diff) tem_per=1-len(tem_ds[tem_ds==0])/len(tem_ds) if (tem_per <0.2 )| (tem_per>0.75): background=gray_lwpCV else: ret,diff_binary = cv2.threshold(diff, 10, 255, cv2.THRESH_BINARY)# 对差值diff进行二值化 contours, hierarchy = cv2.findContours(diff_binary,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) # 对二值化之后得结果进行轮廓提取 for c in contours: if (cv2.contourArea(c) < area_threh): # 对于矩形区域,只显示大于给定阈值的轮廓(去除微小的变化等噪点) continue (x, y, w, h) = cv2.boundingRect(c) # 该函数计算矩形的边界框 cv2.rectangle(input_image, (x, y), (x+w, y+h), (0, 255, 0), 2) cv2.imshow('frame diff', np.hstack((input_image,cv2.cvtColor(diff,cv2.COLOR_GRAY2BGR)))) if cv2.waitKey(50)&0xFF==ord("q"): break cam.release() cv2.destroyAllWindows()实现效果算法分析优点实现简单,运行速度快缺点存在"鬼影"问题(指在物体原来得位置和现在得位置都出现了该物体),三帧差法算法原理连续三帧,12相减,23相减,结果做与运算。相减公式:其中阈值T需要手动调整。结果得到一个二值图,对二值图进行形态学处理,再进行轮廓提取。算法实现 import cv2 import numpy as np video_path = "./test.mp4" cap = cv2.VideoCapture(video_path) width =int(cap.get(cv2.CAP_PROP_FRAME_WIDTH)) height =int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT)) # 初始化第1.2.3帧 one_frame = np.zeros((height,width),dtype=np.uint8) two_frame = np.zeros((height,width),dtype=np.uint8) three_frame = np.zeros((height,width),dtype=np.uint8) area_threh = 100 # 物体bbox面积阈值 while cap.isOpened(): ret,frame = cap.read() frame_gray =cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY) if not ret: break one_frame,two_frame,three_frame = two_frame,three_frame,frame_gray # 1.2帧做差 abs1 = cv2.absdiff(one_frame,two_frame)#相减 _,thresh1 = cv2.threshold(abs1,15,255,cv2.THRESH_BINARY)#二值,大于40的为255,小于0 # 2.3帧做差 abs2 =cv2.absdiff(two_frame,three_frame) _,thresh2 =cv2.threshold(abs2,15,255,cv2.THRESH_BINARY) binary =cv2.bitwise_and(thresh1,thresh2)#与运算 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5)) # erode = cv2.erode(binary,kernel)#腐蚀 # dilate =cv2.dilate(binary,kernel)#膨胀 # dilate =cv2.dilate(dilate,kernel)#膨胀 # 轮廓提取 contours, hierarchy = cv2.findContours(binary.copy(),mode=cv2.RETR_EXTERNAL,method=cv2.CHAIN_APPROX_SIMPLE)#寻找轮廓 for contour in contours: if cv2.contourArea(contour)>area_threh: x,y,w,h =cv2.boundingRect(contour)#找方框 cv2.rectangle(frame,(x,y),(x+w,y+h),(0,255,0), 2) img_show = np.hstack((frame,cv2.cvtColor(binary,cv2.COLOR_GRAY2BGR))) cv2.imshow('three frame diff',img_show) if cv2.waitKey(50)&0xFF==ord("q"): break cap.release() cv2.destroyAllWindows()实现效果不进行形态学处理膨胀一次膨胀两次先腐蚀一次,再膨胀两次算法分析优点实现简单,运行速度快解决了帧差法存在的“鬼影”问题能大致检测出物体的运动区域缺点不进行膨胀会存在“空洞”问题进行膨胀之后会存在着多个物体的”牵连“问题对物体的运动区域的检测不够全面eg:对于部分人运动区域的检测会存在着只检测出半个人的情况参考资料python+opencv实现移动侦测(帧差法):https://www.jb51.net/article/183203.htmopencv python 三帧差法实现运动目标区域检测与完整代码:https://blog.csdn.net/pengpengloveqiaoqiao/article/details/89487049
-
Ubuntu上使用shell脚本实现鼠标自动点击-xdotool 1.鼠标点击器xdotool介绍xdotool作为鼠标精灵类的软件,功能越来越强大。它可以通过命令的方式模拟键盘的输入及鼠标的活动、移动或改变窗口。2.xdotool的安装2.1在Ubuntu下安装:sudo apt-get install xdotool2.2在CenterOS下安装:sudo yum install xdotool3.xdotool基本用法在xdotool安装好后,就可以使用相关的功能啦!比如,获取鼠标位置、移动鼠标、单击鼠标左键、双击,获取键盘输入……你可以打开terminal终端(Ctrl+Alt+T)直接测试相关命令。3.1获取鼠标位置将鼠标移动你想要获取的屏幕位置,在terminal中输入以下命令,可以得到鼠标位置的X,Y坐标值。 xdotool getmouselocation 3.2移动鼠标xdotool mousemove 153 63 #将鼠标移动到(X,Y)坐标为(153,63)的位置;3.3单击鼠标左键、双击xdotool的click命令控制鼠标的活动。在命令中,“1”代表鼠标左键,“2”则是滚轮,“3”则是右键。xdotool click 1 #单击左键 xdotool click 1 click 1 #双击左键3.4睡眠等待sleep 1 # 等待1秒3.5组合操作移动鼠标并单击xdotool mousemove x y click 13.6获取键盘输入模拟击键使用命令xdotool key [name of the key]如果你想要连接两个键,可以在它们之间使用“+”操作符。例如,切换窗口组合键 Alt+Tab。xdotool key alt+Tab要想让xdotool帮你输入,可以使用以下命令:xdotool type ''参考资料Ubuntu上,使用shell脚本实现鼠标自动点击,打开并设置桌面软件:https://blog.csdn.net/dongfang12n/article/details/79995857
-
最简单的 rtmp 推流服务器搭建方法 一开始想到要弄一个简单的 rtmp 服务器是为了给同学上课投射屏幕用。因为我用的是 Linux ,没法用国产的那些课室软件给他们投放屏幕,于是只好出此下策了。我使用的系统是 CentOS 7 和 Ubuntu 16.04 ,所以就想到最简单的方式搭建:使用现成的 Docker 镜像。因为重新编译安装 nginx 对我来说不太现实,会直接影响到我的开发环境。先安装好 dockerCentOS 7 :sudo yum install dockerUbuntu 16.04 :sudo apt-get install docker.io安装好之后执行 systemctl status docker 查看一下 docker 有没有被启动,没有的话执行 sudo systemctl start docker 启动。如果想日后自动启动 docker ,可以执行 sudo systemctl enable docker。docker 需要使用 root 权限来操作,如果嫌麻烦可以把自己加入 docker 的用户组里,或者直接 su root 。这里我直接使用 tiangolo/nginx-rtmp 来搭建 rtmp 服务器。sudo docker pull tiangolo/nginx-rtmp等下载完成之后就可以启动这个镜像sudo docker run -d -p 1935:1935 --name nginx-rtmp tiangolo/nginx-rtmp然后就可以直接使用 OBS 推流了。在推流的地址上填写 rtmp://你电脑的 ip 地址/live,密钥随便填写。然后可以开始串流了。在可以看串流的客户端上(例如 vlc )打开网络串流,地址就是 rtmp://你电脑的 ip 地址/live/你的密钥。因为 CentOS 和 Ubuntu 都有防火墙,如果没法推流或者接收推流的话,有可能是因为防火墙的问题。这时最好让防火墙打开 1935 端口的访问,或者直接关掉防火墙(一般是叫做 firewall 的服务或者 ufirewall )。参考资料大概是最简单的 rtmp 推流服务器搭建方法:https://zhuanlan.zhihu.com/p/52631225
-
快速调用Yolov5模型检检测图片 前提:未修改模型结构1.快速调用官方的Yolov5预模型import torch # 使用torch.hub加载yolov5的预训练模型训练 model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5m, yolov5x, custom # 进行模型调用测试 img_path = './6800.jpg' # or file, PIL, OpenCV, numpy, multiple results = model(img_path) # 得到预测结果 print(results.xyxy) # 输出预测出的bbox_list results.show() # 预测结果展示2.快速调用自己训练好的的Yolov5预模型(有pt文件即可)import torch # 使用torch.hub加载yolov5的预训练模型训练 model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5m, yolov5x, custom # 加载自己训练好的模型及相关参数 cpkt = torch.load("./best.pt",map_location=torch.device("cuda:0")) # 将预训练的模型的骨干替换成自己训练好的 yolov5_load = model yolov5_load.model = cpkt["model"] # 进行模型调用测试 img_path = './6800.jpg' # or file, PIL, OpenCV, numpy, multiple results = yolov5_load(img_path) # 得到预测结果 print(results.xyxy) # 输出预测出的bbox_list results.show() # 预测结果展示参考资料https://github.com/ultralytics/yolov5
-
js replace全部替换的方法 js replace全部替换的方法replace替换第一次出现的字符串 var str = '我在中国北方纯正的中国北方人'; var newstr=str.replace('北方','南方'); console.log(newstr); //我在中国南方纯正的中国南方人使用正则替换字符串中匹配的所有字符串(实现replaceAll效果) var str = '我在中国北方纯正的中国北方人'; var reg = new RegExp( '北方' , "g" ) var newstr = str.replace( reg , '南方' ); console.log(newstr); //我在中国南方纯正的中国南方人封装成replaceAll挂载到原型链String.prototype.replaceAll=function(a,b){//吧a替换成b var reg=new RegExp(a,"g"); //创建正则RegExp对象 return this.replace(reg,b); } //实例 var str = '我在中国北方纯正的中国北方人'; var newstr=str.replaceAll('北方','南方'); console.log(newstr); //我在中国南方纯正的中国南方人参考资料js replace全部替换的方法:https://blog.csdn.net/nizhengjia888/article/details/84143650
-
linux iperf 局域网测速 linux iperf 局域网测速iperf 百科描述Iperf 是一个网络性能测试工具。Iperf可以测试最大TCP和UDP带宽性能,具有多种参数和UDP特性,可以根据需要调整,可以报告带宽、延迟抖动和数据包丢失iperf使用1.服务端启动服务,作为server:sudo apt-get install iperf iperf -s -i 2 # 每两秒间隔输出测试结果2.客户端启动服务,作为client:sudo apt-get install iperf iperf -c <server_IP> -t 10iperf 结果分析每两秒输出的结果 Transfer是数据量,Bandwidth是这些数据量的传输时的速度Server listening on TCP port 5001 TCP window size: 128 KByte (default) ------------------------------------------------------------ [ 4] local 192.168.0.120 port 5001 connected with 192.168.0.233 port 56144 [ ID] Interval Transfer Bandwidth [ 4] 0.0- 2.0 sec 22.3 MBytes 93.7 Mbits/sec [ 4] 2.0- 4.0 sec 22.4 MBytes 94.1 Mbits/sec [ 4] 4.0- 6.0 sec 22.4 MBytes 94.2 Mbits/sec [ 4] 6.0- 8.0 sec 22.4 MBytes 94.1 Mbits/sec [ 4] 8.0-10.0 sec 22.4 MBytes 94.1 Mbits/sec [ 4] 0.0-10.0 sec 113 MBytes 94.1 Mbits/sec参考资料1.arm linux iperf 局域网测速:https://blog.csdn.net/shenhuxi_yu/article/details/111612609
-
YOLOv5项目目录结构 YOLOv5项目目录结构| detect.py #检测脚本 | hubconf.py #PyTorch Hub相关代码 | LICENSE #版权文件 | README.md #README markdown文件 | requirements.txt #项目所需的安装包列表 | sotabench.py #COCO数据集测试脚本 | test.py #模型测试脚本 | train.py #模型训练脚本 | tutorial.ipynb #Jupyter Notebook演示代码 |---data | | coco.yaml #COCO数据集配置文件 | | coco128.yaml #COCO128数据集配置文件 | | hyp.finetune.yaml #超参数微调配置文件 | | hyp.scratch.yaml #超参数起始配置文件 | | voc.yaml #VOC数据集配置文件 | |---scripts | | | get_coco.sh #下载COCO数据集shell命令 | | | get_voc.sh #下载VOC数据集shell命令 |---inference | |---images #示例图片文件夹 | | | bus.jpg | | | zidane.jpg |---models | | common.py #模型组件定义代码 | | experimental.py #实验性质的代码 | | export.py #模型导出脚本 | | yolo.py #Detect及Model构建代码 | | yolov5l.yaml #yolov51网络模型配置文件 | | yolov5m.yaml #yolov5m网络模型配置文件 | | yolov5s.yaml #yolov5s网络模型配置文件 | | yolov5x.yaml #yolov5x网络模型配置文件 | | __init__.py | |---hub | | | yolov3-spp.yaml | | | yolov5-fpn.yaml | | | yolov5-panet.yaml |---runs #训练结果 | |---exp0 | | | events.out.tfevents.1604835533.PC-201807230204.26148.0 | | | hyp.yaml | | | labels.png | | | opt.yaml | | | orecision-recall_curve.png | | | results.png | | | results.txt | | | test_batch0_gt.jpg | | | test_batch0_pred.jpg | | | train_batch0.jpg | | | train_batch1.jpg | | | train_batch2.jpg | | |---weights | | | | best.pt #最好权重 | | | | last.pt #最近权重 |---utils | | activations.py #激活函数定义代码 | | datasets.py #Dataset及Dataloader定义代码 | | evolve.sh #超参数进化命令 | | general.py #项目通用函数代码 | | google_utils.py #谷歌云使用相关代码 | | torch_utils.py #辅助程序代码 | | __init_.py | |---google_app_engine | | | additional_requirements.txt | | | app.yaml | | | Dockerfile |---VOC #数据集目录 | |---images #数据集图片目录 | | |---train #训练集图片文件夹 | | | | 1000005.jpg | | | | 000007.jpg | | | | 000009.jpg | | | | 000012.jpg | | | | 000016.jpg | | | | ...... | | |---val #验证集图片文件夹 | | | | 000001.jpg | | | | 000002.jpg | | | | 000003.jpg | | | | 000004.jpg | | | | 000006.jpg | | | | ...... | |---labels #数据集标签目录 | | | train.cache | | | val.cache | | |---train #训练集标签文件夹 | | | | 000005.txt | | | | 000007.txt | | | | 000009.txt | | | | 000012.txt | | | | 000016.txt | | | | ...... | | |---val #测试集标签文件夹 | | | | 000001.txt | | | | 000002.txt | | | | 000003.txt | | | | 000004.txt | | | | 000006.txt | | | | ...... |---weights | | download weights.sh #下载权重文件命令 | | yolov5l.pt #yolov5l权重文件 | | yolov5m.pt #yolov5m权重文件 | | yolov5s.mlmodel #yolov5s权重文件(Core ML格式) | | yolov5s.onnx #yolov5s权重文件(onnx格式) | | yolov5s.pt #yolov5s权重文件 | | yolov5s.torchscript.pt #yolov5s权重文件(torchscript格式) | | yolov5x.pt #yolov5x权重文件参考资料1.https://www.bilibili.com/video/BV19K4y197u8?p=14
-
linux下配置远程免密登录 linux下配置远程免密登录ssh远程登录的身份验证方式ssh远程登录有两种身份验证:用户名+密码密钥验证机器1生成密钥对并将公钥发给机器2,机器2将公钥保存。机器1要登录机器2时,机器2生成随机字符串并用机器1的公钥加密后,发给机器1。机器1用私钥将其解密后发回给机器2,验证成功后登录1、用户名+密码机器1要登录到机器2ssh 机器2的ip(默认使用root用户登录,也可指定,如:ssh a@192.168.25.14 表示指定由a用户登录机器2)询问是否需要创建连接 yes输入机器2中root用户的密码即可登录到机器2输入exit回到机器12、远程免密登录输入命令ssh-keygen按三次回车,完成生成私钥和公钥到/root/.ssh目录下可看到刚刚那条命令生成的私钥和公钥输入ssh-copy-id 机器2的ip再输入机器2的密码,即可将公钥传给机器2机器2的/root/.ssh目录下的authorized_keys文件保存着刚才机器1传过来的公钥(可用cat命令查看,并对比机器1上的公钥,是一样的)机器1上直接输入ssh 机器2的ip即可登录机器2,不用再输密码,自此完成了远程免密登录的配置参考资料【图文详解】linux下配置远程免密登录:https://www.cnblogs.com/52mm/p/p5.html
-
Ubuntu搭建 Samba 服务步骤 1.安装 Samba 服务sudo apt install samba samba-common2.配置需要共享的目录# 新建目录,用于共享 sudo mkdir /usr/local/volumes # 更改权限信息 sudo chown nobody:nogroup /usr/local/volumes # 给所有用户添加读写权限 sudo chmod 777 /usr/local/volumes3.添加 Samba 用户添加 Samba 用户,用于在访问共享目录时使用。这里添加的用户在 Linux 中必须存在。sudo smbpasswd -a alan4.配置 Samba修改 /etc/samba/smb.conf,在最后面添加以下配置:[Volumes] comment = TimeCapsule Volumes path = /usr/local/volumes browseable = yes writable = yes available = yes valid users = alan5.重启 Samba 服务sudo service smbd restart参考资料Ubuntu 20.04 搭建 Samba 服务