


1.原论文
ECCV2018--ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design
2.设计理念
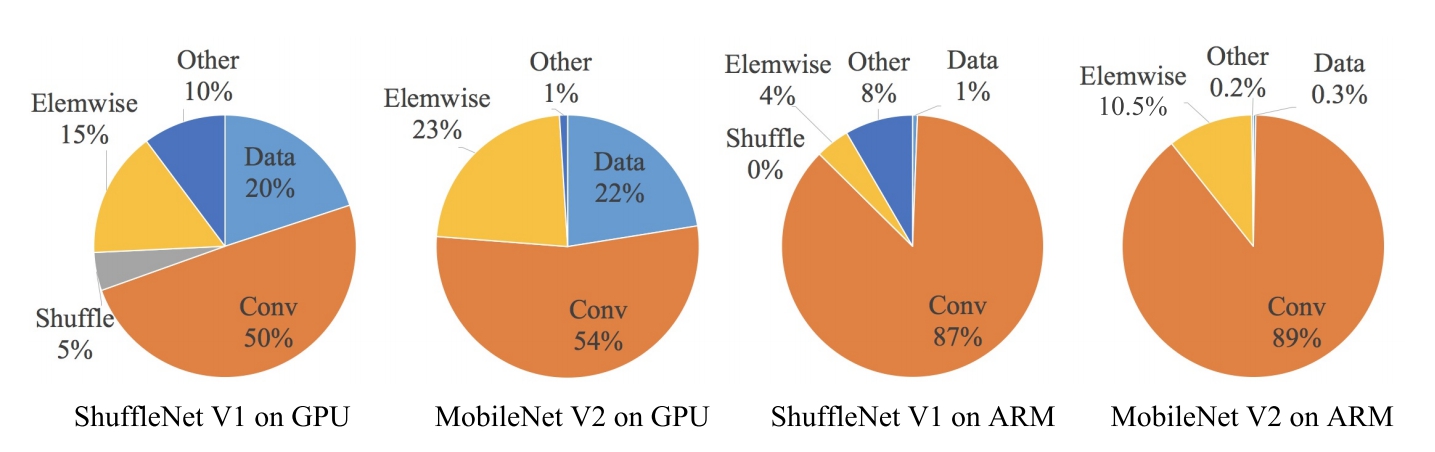
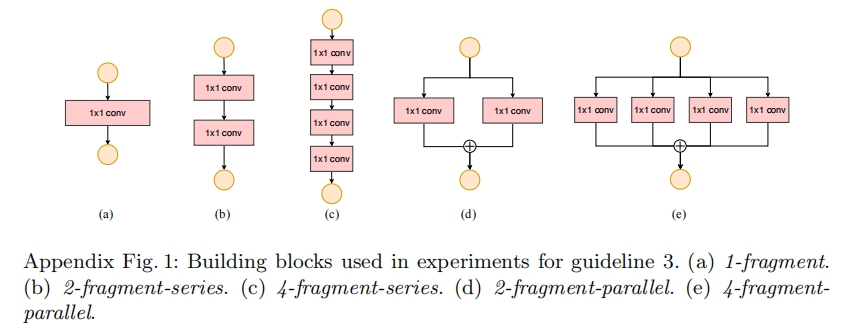
目前衡量模型复杂度的一个通用指标是FLOPs,具体指的是multiply-add数量,但是这却是一个间接指标,因为它不完全等同于速度。如图1中的(c)和(d)

可以看到相同FLOPs的两个模型,其速度却存在差异。这种不一致主要归结为两个原因,首先影响速度的不仅仅是FLOPs,如内存使用量(memory access cost, MAC),这不能忽略,对于GPUs来说可能会是瓶颈。另外模型的并行程度也影响速度,并行度高的模型速度相对更快。另外一个原因,模型在不同平台上的运行速度是有差异的,如GPU和ARM,而且采用不同的库也会有影响。
3.根据设计理念及实验得出的4条基本设计准则
3.1探索实验
据此,作者在特定的平台下研究ShuffleNetv1和MobileNetv2的运行时间,并结合理论与实验得到了4条实用的指导原则:
G1:同等通道大小最小化内存访问量
对于轻量级CNN网络,常采用深度可分割卷积(depthwise separable convolutions),其中点卷积( pointwise convolution)即1x1卷积复杂度最大。这里假定输入和输出特征的通道数分别为 $c1$和$c2$,特征图的空间大小为$h \times w$,那么1x1卷积的FLOPs为
$$ B=hwc_1c_2 $$
对应的MAC(memory access cost)为
$$ MAC = hw(c_1+c_2)+c_1c_2 $$
根据均值不等式(这里假定内存足够),固定B时,MAC存在下限(令$c_2=\frac{B}{hwc_1}$),则
$$ MAC \ge 2 \sqrt{hwB} + \frac{B}{hw} $$
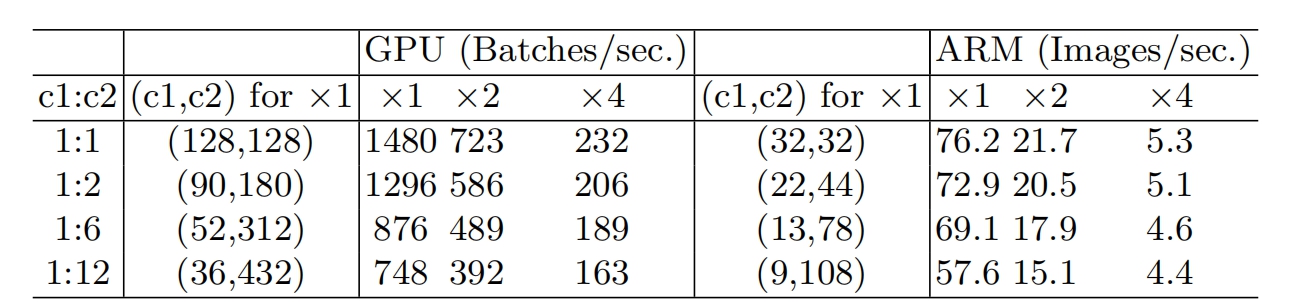
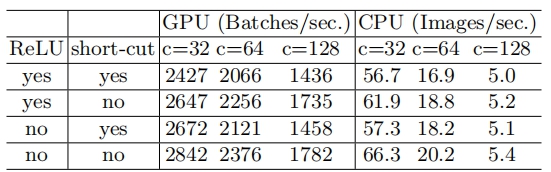
仅当$c_1=c_2$时,MAC取最小值,这个理论分析也通过实验得到证实,如下表所示,通道比为1:1时速度更快。
G2:过量使用组卷积会增加MAC(memory access cost)
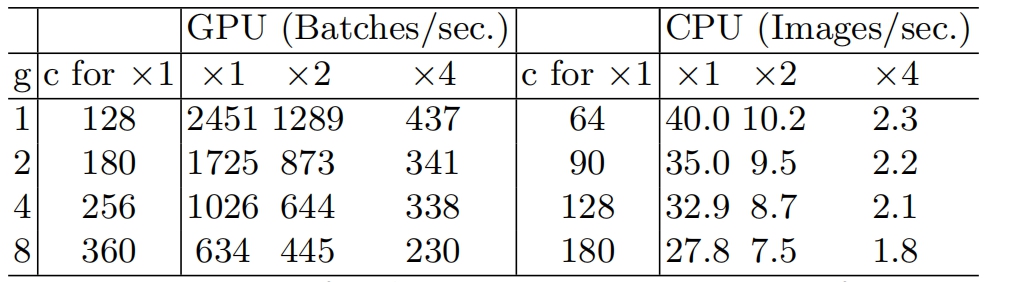
组卷积(group convolution)是常用的设计组件,因为它可以减少复杂度却不损失模型容量。但是这里发现,分组过多会增加MAC(memory access cost)。对于组卷积,FLOPs为(其中g为组数):
$$ B = hwc_1c_2/g $$
对应的MAC(memory access cost)为
$$ MAC = hwc_1+Bg/c_1+B/hw $$
可以看到,在输入确定,B相同时,当g增加时,MAC(memory access cost)会同时增加,下表是对应的实验,所以明智之举是不要使用太大 ![[公式]](https://www.zhihu.com/equation?tex=g) 的组卷积。
G3:网络碎片化会降低并行度
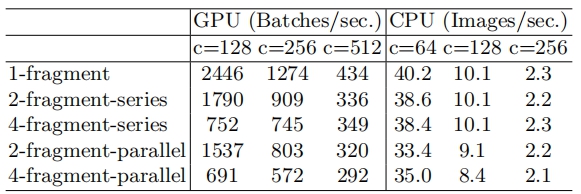
一些网络如Inception,以及Auto ML自动产生的网络NASNET-A,它们倾向于采用“多路”结构,即存在一个lock中很多不同的小卷积或者pooling,这很容易造成网络碎片化,减低模型的并行度,相应速度会慢,这也可以通过实验得到证明。
G4:不能忽略元素级操作(比如ReLU和Add)
对于元素级(element-wise operators)比如ReLU和Add,虽然它们的FLOPs较小,但是却需要较大的MAC(memory access cost)。这里实验发现如果将ResNet中残差单元中的ReLU和shortcut移除的话,速度有20%的提升。
4.ShuffleNet-v1 基本结构及存在的问题
4.1ShuffleNet-v1基本结构
其中:
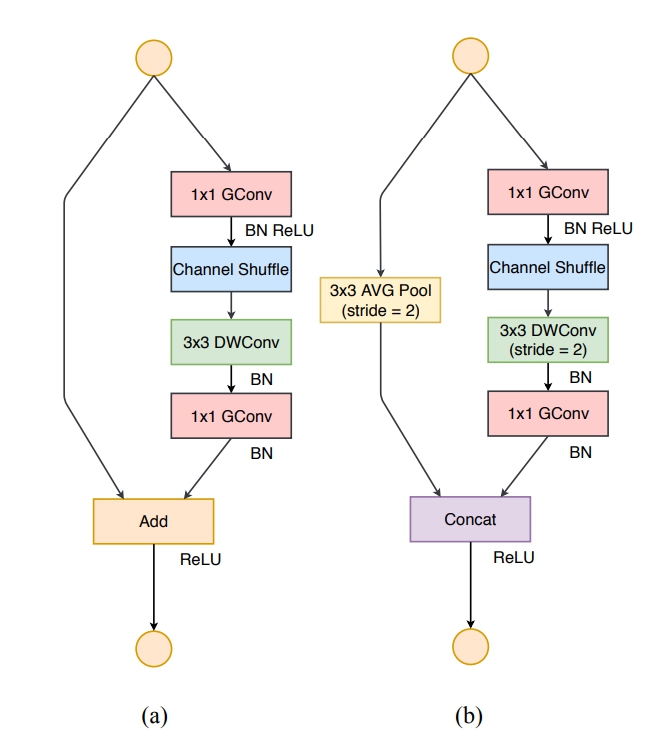
- (a) the basic ShufflleNet unit;
- (b) the ShufflleNet unit for spatial down sampling (2×);
4.2ShuffleNet-v1存在的问题
- 在ShuffleNetv1的模块中,大量使用了1x1组卷积,这违背了G2原则,
- 另外v1采用了类似ResNet中的瓶颈层(bottleneck layer),输入和输出通道数不同,这违背了G1原则。
- 同时使用过多的组,也违背了G3原则。
- 短路连接中存在大量的元素级Add运算,这违背了G4原则。
5.ShuffleNet-v2基本块及改进分析
5.1ShuffleNet-v2基本块
根据前面的4条准则,作者分析了ShuffleNetv1设计的不足,并在此基础上改进得到了ShuffleNetv2,两者模块上的对比如下图所示:
其中
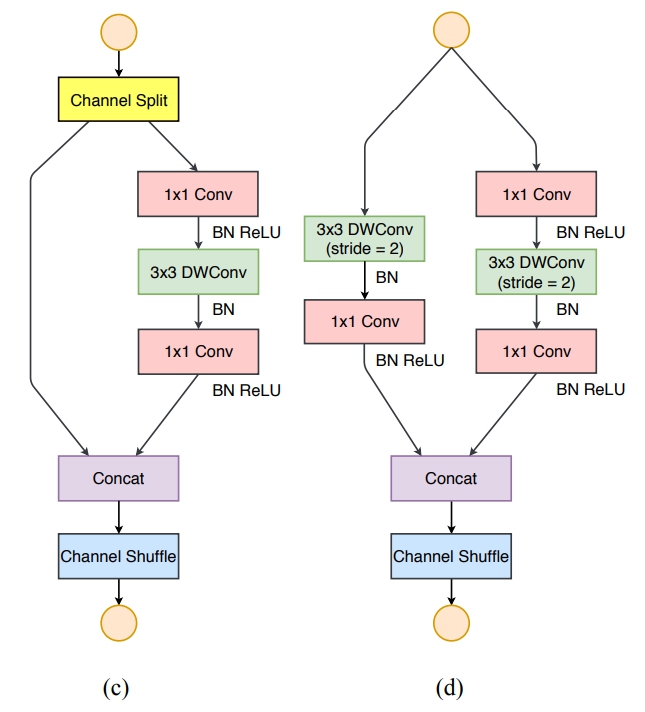
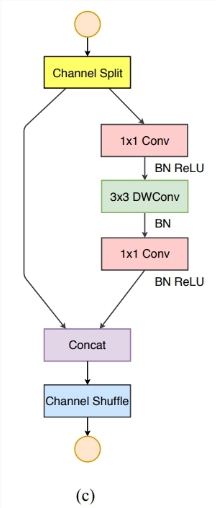
- (c) the basic ShufflleNetv2 unit;
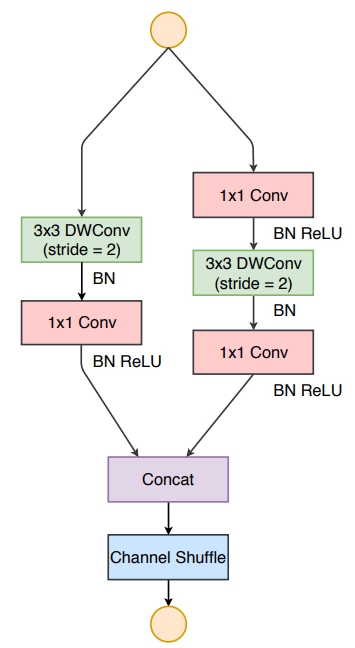
- (d) the ShufflleNetv2 unit for spatial down sampling (2×);
- DWConv: depthwise convolution
- GConv:group convolution
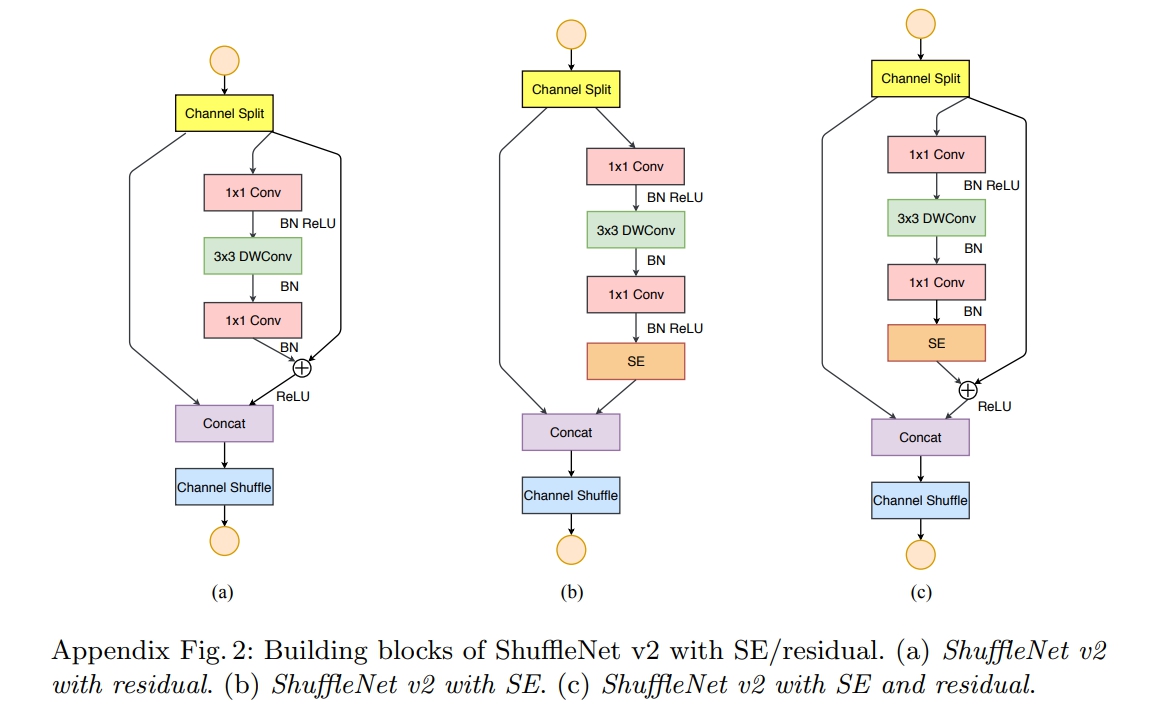
对于ShufflleNetv2基本块(the ShufflleNetv2 unit)还可以选择是否采用SE(Squeeze-and-Excitation)模块和残差(residual)结构
5.2ShuffleNetv2的改进分析
为了改善v1的缺陷,根据四条原则,作者提出了shufflenet v2。v2版本引入了一种新的运算:channel split(如上图网路结构中的图c)。
channel split的做法:
- 在开始时先将输入特征图在通道维度分成两个分支:通道数分别为 $c'$ 和 $c-c'$ ,实际实现时$c'=c/2$ 。
- 一个是identity,一个经过三个conv,然后concat到一起,这个满足G4。
- 右边的分支包含3个连续的卷积,并且输入和输出通道相同,这符合G1。
- 而且两个1x1卷积不再是组卷积,这符合G2
- 另外两个分支相当于已经分成两组。两个分支的输出不再是Add元素,而是concat在一起。
- 取替了element-wise操作add。最后经过channel shuffle将两个分支的信息进行交流。
channel split的作用:
- 第一,划分一半到右分支,意味着右边计算量减少,从而可以提高channel数,提高网络capacity。
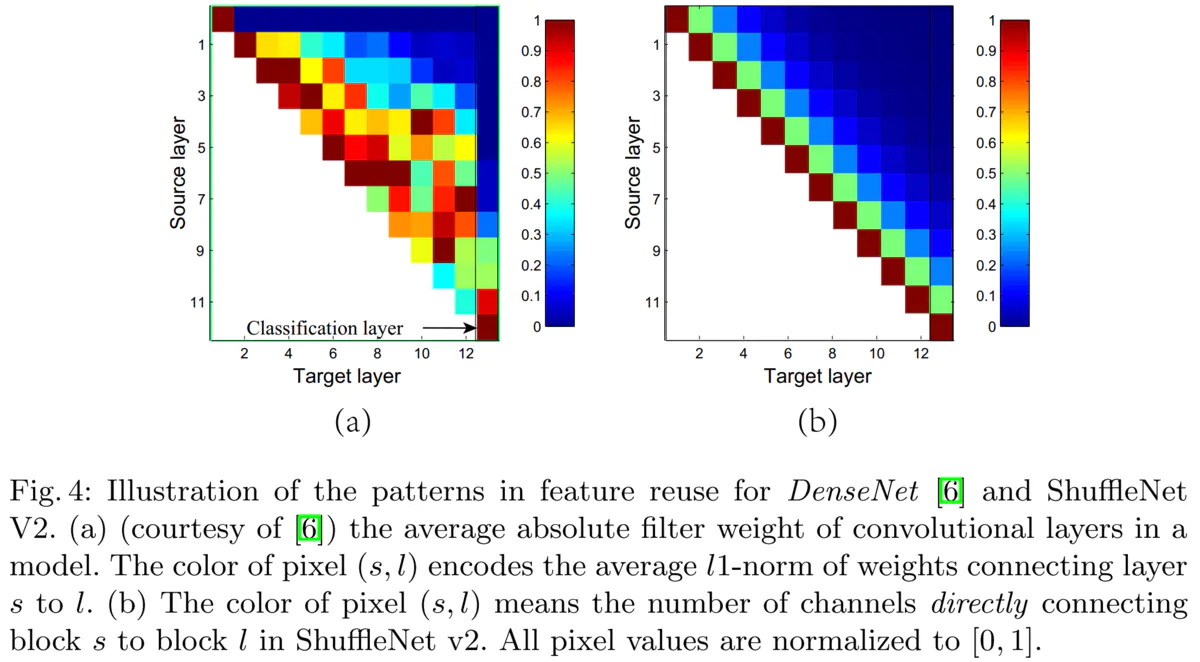
- 第二,左分支相当于一种特征重用(feature reuse), 跟DenseNet和CondenseNet一样的思想。
下图(a)为DenseNet的从source layer到target layer连接的权重的大小,可见target层前1-3层的信息对当前层帮助较大,而越远的连接比较多余。图(b)为ShuffleNet v2的情况,
因为shuffle操作会导致每次会有一半的channel到下一层。因此,作者认为shufflenet跟densenet一样的利用到了feature reuse,所以有效。
6.ShuffleNet-v2完整网络结构
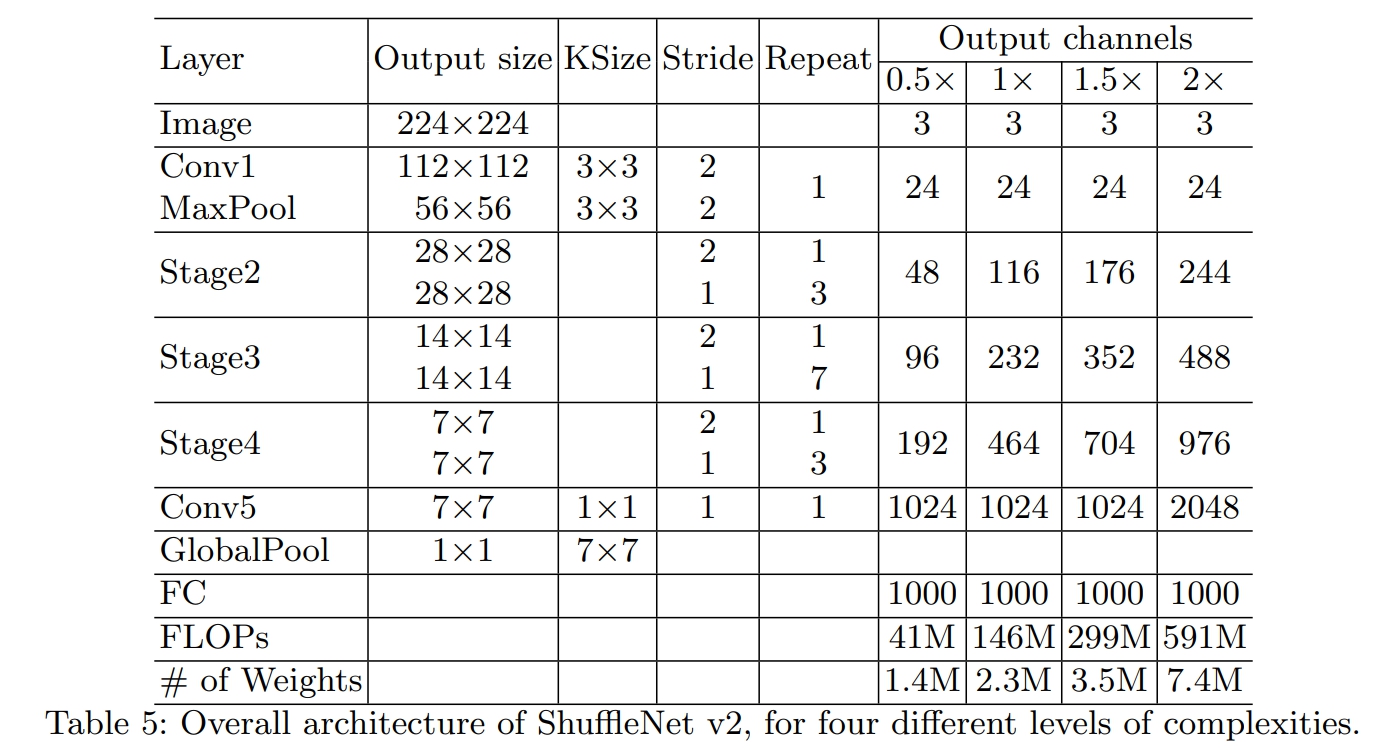
其中:
- 1个stage=1个DSampling+Repeat个BasicUnit
7.ShuffleNet-v2基本块实现(pytorch)
7.1Channel Shuffle
- 图示
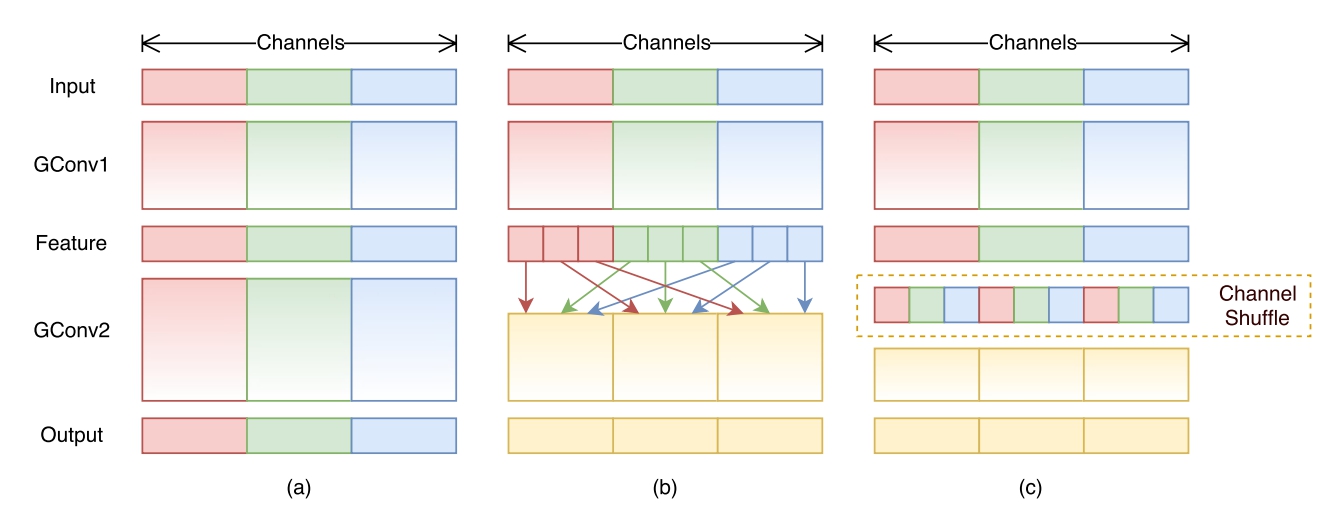
实现步骤
- 假定将输入层分为 g 组,总通道数为 g × n 。
- 首先你将通道那个维度拆分为 (g,n) 两个维度
- 然后将这两个维度转置变成 (n,g)
- 最后重新reshape成一个维度 g × n 。
- 代码
# Channel Shuffle
def shuffle_chnls(x, groups=2):
"""Channel Shuffle"""
bs, chnls, h, w = x.data.size()
# 如果通道数不是分组的整数被,则无法进行Channel Shuffle操作,直接返回x
if chnls % groups:
return x
# 计算用于Channel Shuffle的一个group的的通道数
chnls_per_group = chnls // groups
# 执行channel shuffle操作
x = x.view(bs, groups, chnls_per_group, h, w) # 将通道那个维度拆分为 (g,n) 两个维度
x = torch.transpose(x, 1, 2).contiguous() # 将这两个维度转置变成 (n,g)
x = x.view(bs, -1, h, w) # 最后重新reshape成一个维度 g × n g\times ng×n
return x7.2ShufflleNetv2基本块( the basic ShufflleNetv2 unit)
- 基本结构图示
- 增加SE(Squeeze-and-Excitation)模块和残差(residual)结构后的基本块结构图示
- 代码
# 封装一个Conv+BN+RELU的基本块
class BN_Conv2d(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride, padding,
dilation=1, groups=1, bias=False, activation=True): # dilation=1-->卷积核膨胀
super(BN_Conv2d, self).__init__()
layers = [nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride,
padding=padding, dilation=dilation, groups=groups, bias=bias),
nn.BatchNorm2d(out_channels)]
if activation:
layers.append(nn.ReLU(inplace=True))
self.seq = nn.Sequential(*layers)
def forward(self, x):
return self.seq(x)# ShuffleNet-v2基本块
class BasicUnit(nn.Module):
def __init__(self, in_chnls, out_chnls, is_se=False, is_residual=False, c_ratio=0.5, groups=2):
super(BasicUnit, self).__init__()
self.is_se, self.is_res = is_se, is_residual # 是否使用SE结构和残差结构
self.l_chnls = int(in_chnls * c_ratio) # 左侧输入通道数
self.r_chnls = in_chnls - self.l_chnls # 右侧输入通道数
self.ro_chnls = out_chnls - self.l_chnls # 右侧输出通道数
self.groups = groups
# layers
self.conv1 = BN_Conv2d(self.r_chnls, self.ro_chnls, 1, 1, 0)
self.dwconv2 = BN_Conv2d(self.ro_chnls, self.ro_chnls, 3, 1, 1, # same padding, depthwise conv
groups=self.ro_chnls, activation=None)
act = False if self.is_res else True
self.conv3 = BN_Conv2d(self.ro_chnls, self.ro_chnls, 1, 1, 0, activation=act)
# 是否使用SE模块和residual结构
if self.is_se:
self.se = SE(self.ro_chnls, 16)
if self.is_res:
self.shortcut = nn.Sequential()
if self.r_chnls != self.ro_chnls:
self.shortcut = BN_Conv2d(self.r_chnls, self.ro_chnls, 1, 1, 0, activation=False)
def forward(self, x):
# channel split 操作
x_l = x[:, :self.l_chnls, :, :]
x_r = x[:, self.r_chnls:, :, :]
# right path
out_r = self.conv1(x_r)
out_r = self.dwconv2(out_r)
out_r = self.conv3(out_r)
# 是否使用SE模块和residual结构
if self.is_se:
coefficient = self.se(out_r)
out_r *= coefficient
if self.is_res:
out_r += self.shortcut(x_r)
# concatenate
out = torch.cat((x_l, out_r), 1)
return shuffle_chnls(out, self.groups)7.3ShufflleNetv2下采样基本块(the ShufflleNetv2 unit for spatial down sampling)
- 图示
- 代码
# SuffleNet-v2下采样基本块
class DSampling(nn.Module):
def __init__(self, in_chnls, groups=2):
super(DSampling, self).__init__()
self.groups = groups
# down-sampling(通过stride=2实现), depth-wise conv(通过groups=in_chnls实现).
self.dwconv_l1 = BN_Conv2d(in_chnls, in_chnls, 3, 2, 1,
groups=in_chnls, activation=None)
self.conv_l2 = BN_Conv2d(in_chnls, in_chnls, 1, 1, 0)
self.conv_r1 = BN_Conv2d(in_chnls, in_chnls, 1, 1, 0)
self.dwconv_r2 = BN_Conv2d(in_chnls, in_chnls, 3, 2, 1, groups=in_chnls, activation=False)
self.conv_r3 = BN_Conv2d(in_chnls, in_chnls, 1, 1, 0)
def forward(self, x):
# left path
out_l = self.dwconv_l1(x)
out_l = self.conv_l2(out_l)
# right path
out_r = self.conv_r1(x)
out_r = self.dwconv_r2(out_r)
out_r = self.conv_r3(out_r)
# concatenate
out = torch.cat((out_l, out_r), 1)
return shuffle_chnls(out, self.groups)8.ShuffleNet-v2网络结构实现
# TODO
评论 (0)